Suter 2-stroke engines, ePropelled DC electric motors/ESC’s & starter-generators, H3 Dynamics Fuel Cells including storage and remote fuel filling, Mejzlik carbon fiber propellers.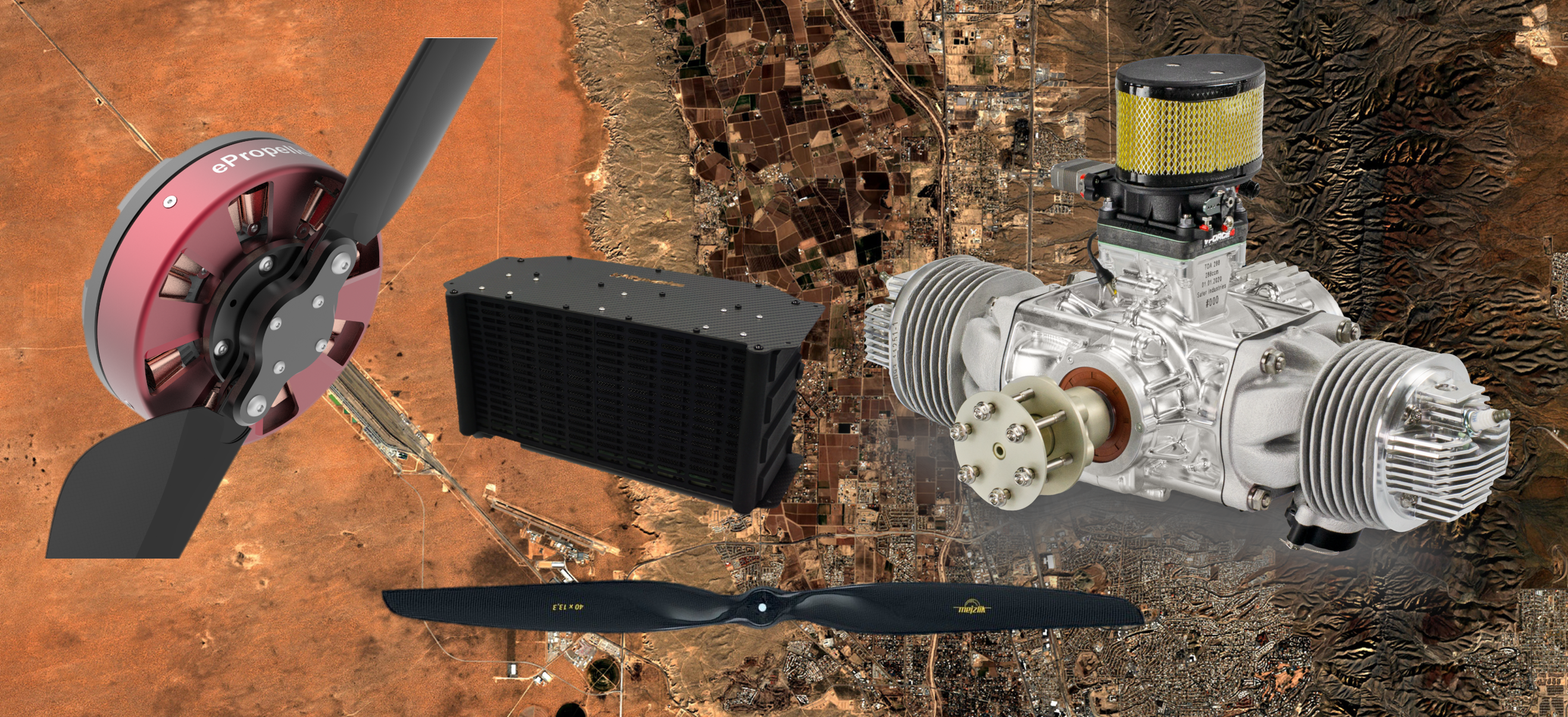
MicroPilot autopilots (board mount, enclosed, triple redundant) including GCS software and SDK, Volz servo actuators for control surfaces & throttle, Aeron Systems MEMS-INS-GPS & Galileo digital compasses.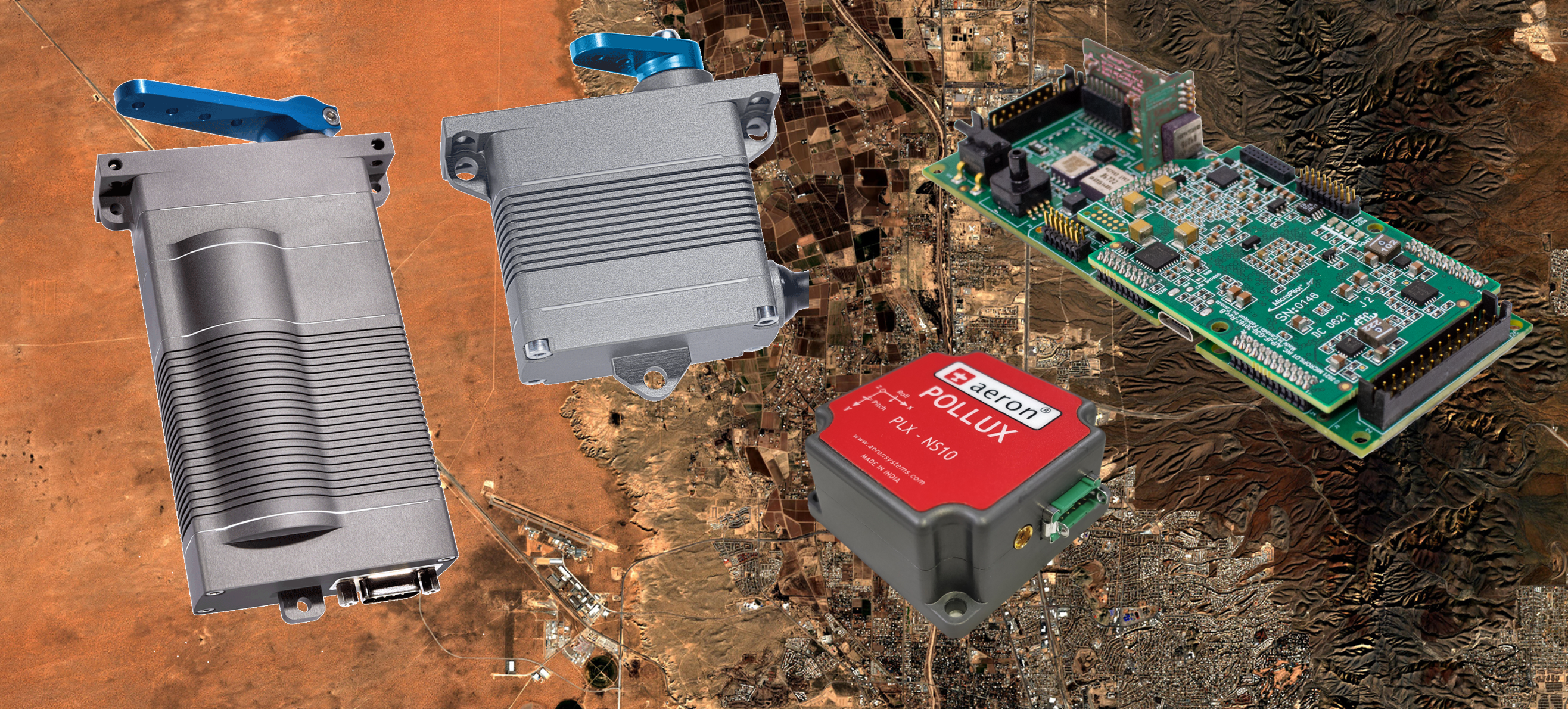
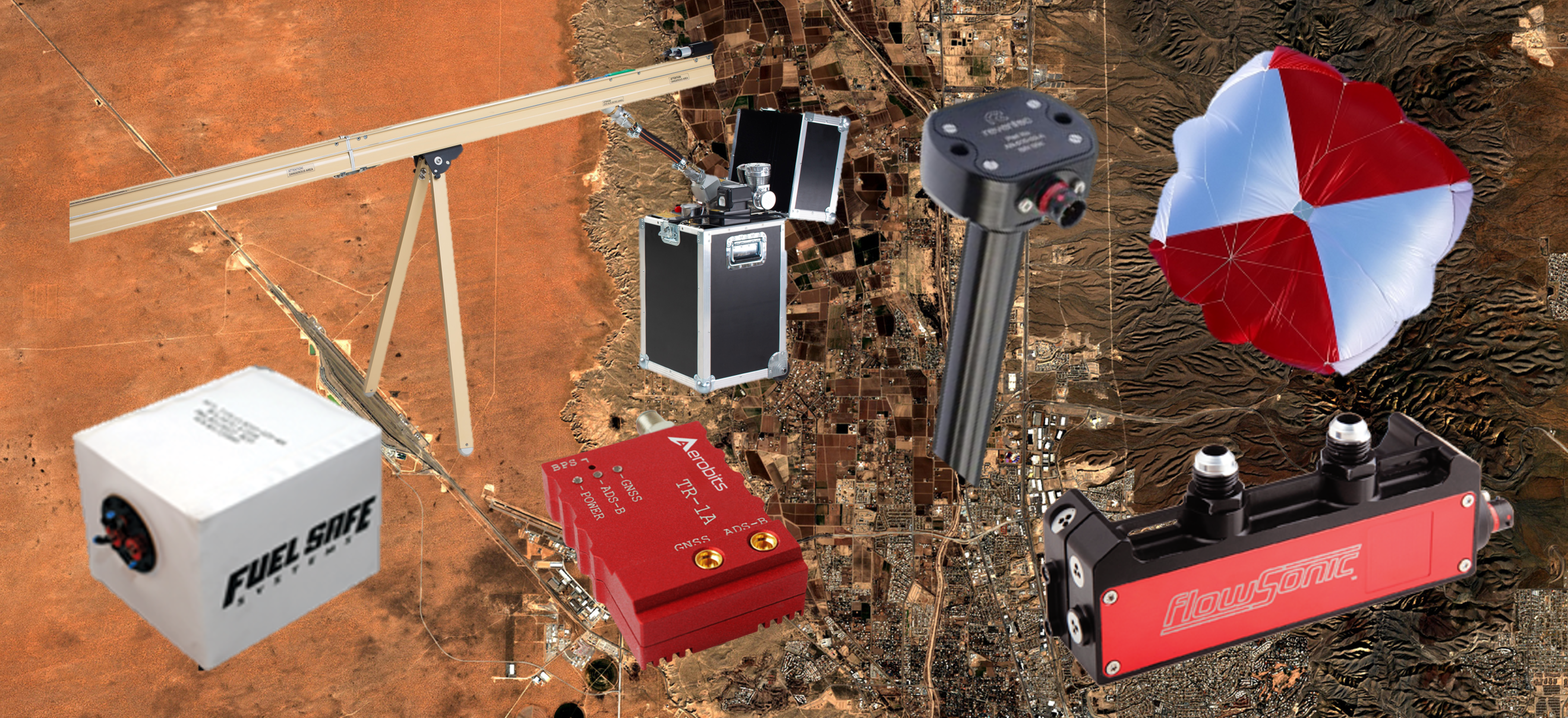
Reventec capacitive fuel level sensors, Sentronics ultrasonic fuel flow sensors, Fuel Safe fuel tanks, Eli Airborne pneumatic launchers & parachute release mechanisms, ProtectUAV/ParaZero parachute rescue systems, Aerobits ADS-B/Remote ID.