
UAV Propulsion Tech is a US company located in Tampa, FL that markets advanced UAV technology from Germany, Switzerland, Canada, United Kingdom, France, Israel, Czech Republic, Poland, India and Estonia into the US UAV market. These solutions include commercial off the shelf (COTs) and custom hardware solutions that are flying on several high-end global UAV platforms. This website provides more info about the solutions available to the US market.
Contact us today
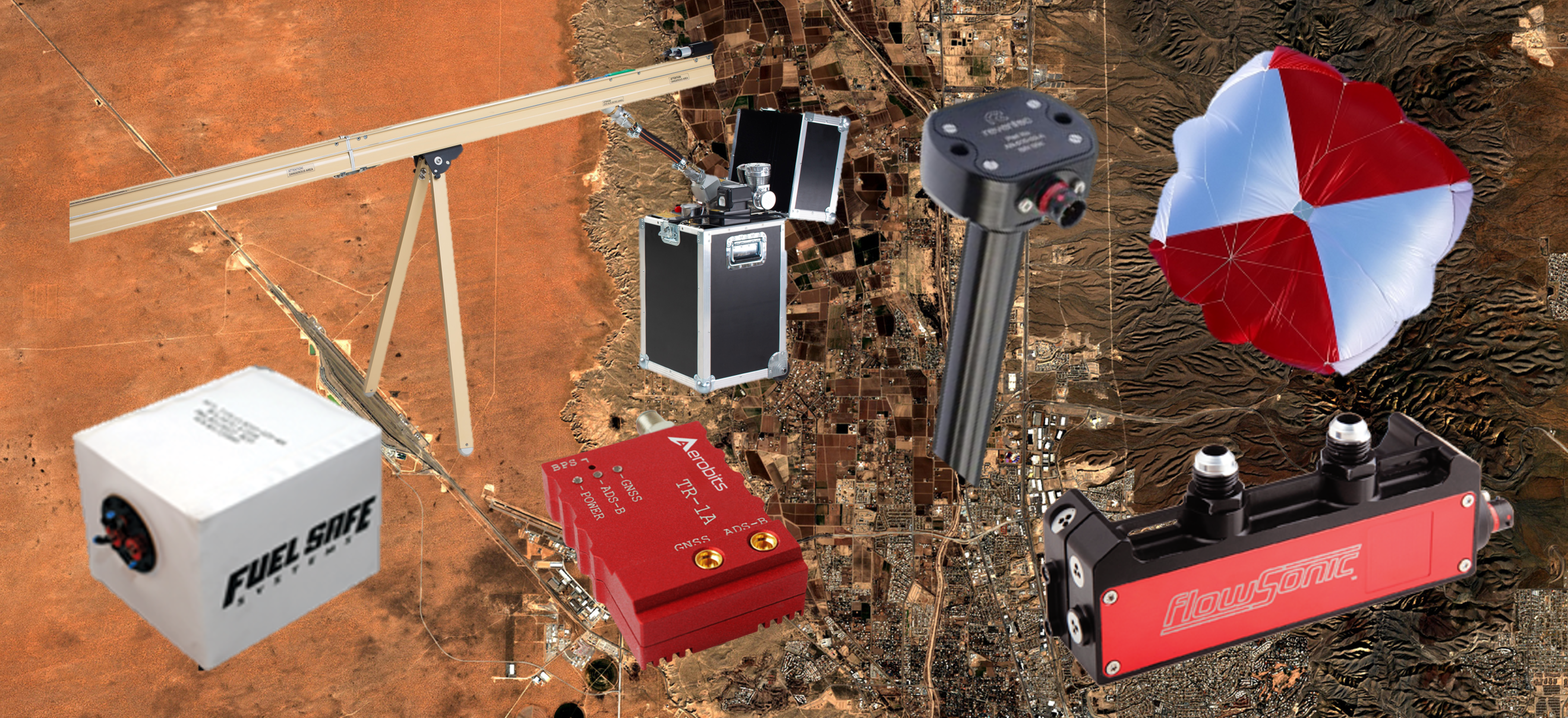
Gyro-stabilized UAV Payload Systems

Aerobits – Aviation Transponders
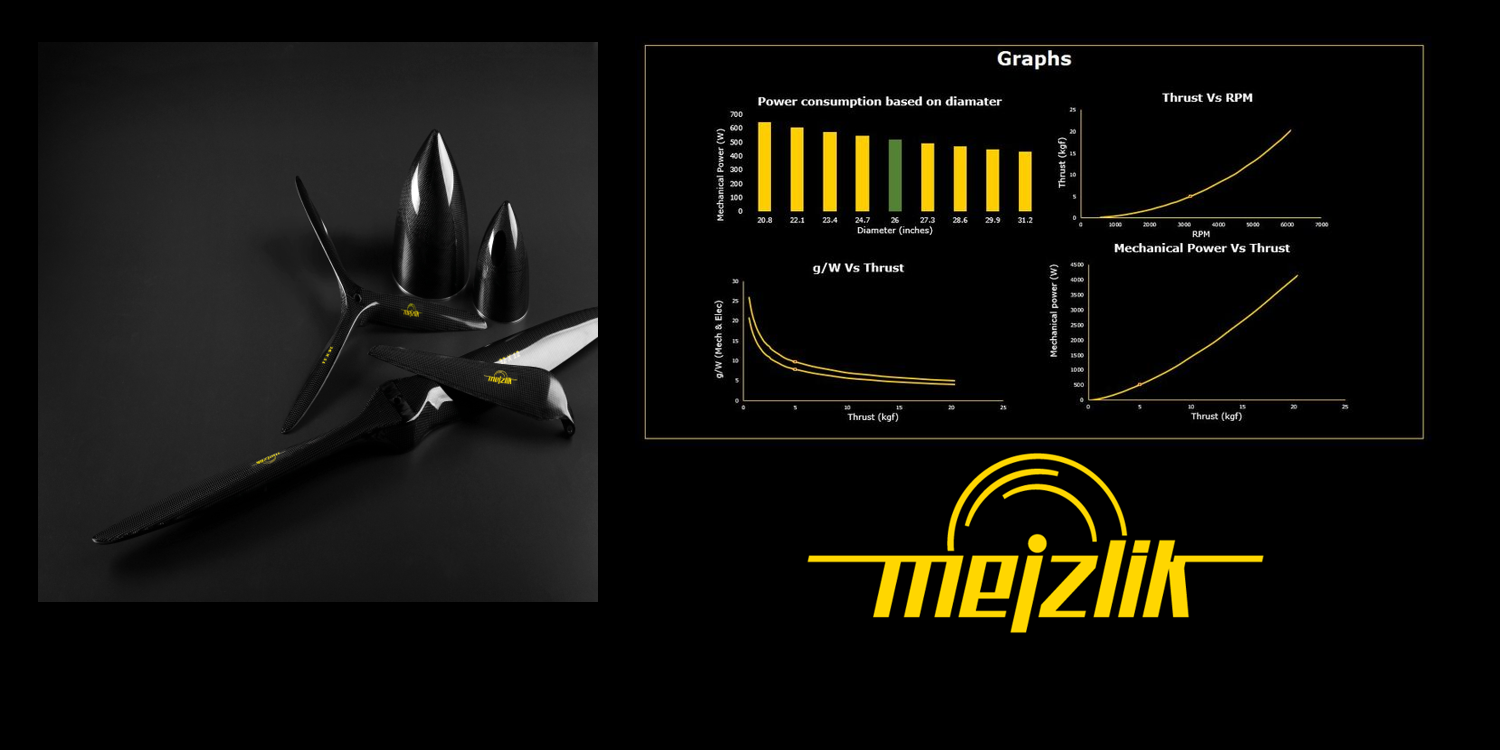
Mejzlik Propellers
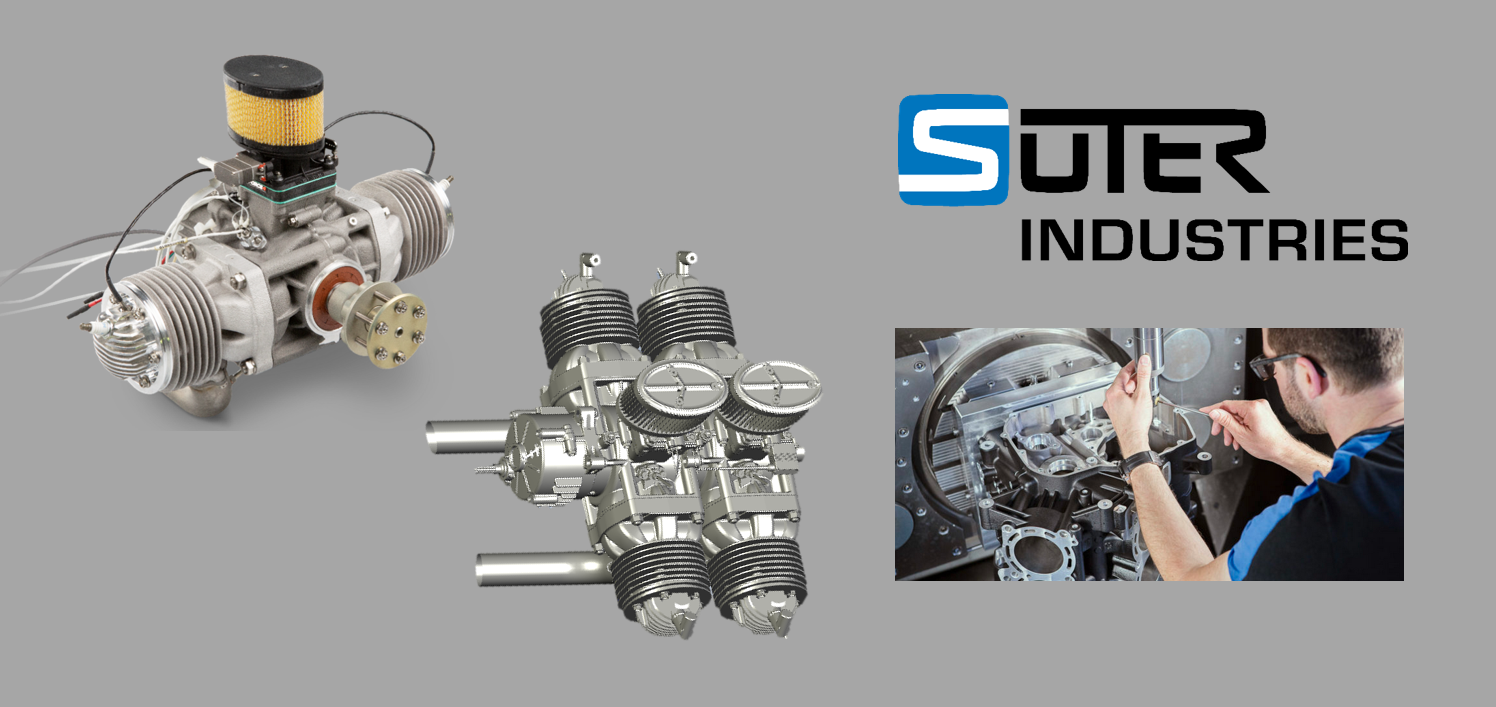
Suter Industries UAV Engines

ePropelled Motors/Generators

Fuel Systems

H3 Dynamics – Fuel Cell Solutions

Aeron Systems inertial navigation systems & digital magnetic compass
MicroPilot Autopilots

ParaZero & ProtectUAV Rescue/Recovery Chutes

Volz Servo Actuators

Suter 2-stroke engines, ePropelled DC electric motors/ESC’s & starter-generators, H3 Dynamics Fuel Cells including storage and remote fuel filling, Mejzlik carbon fiber propellers.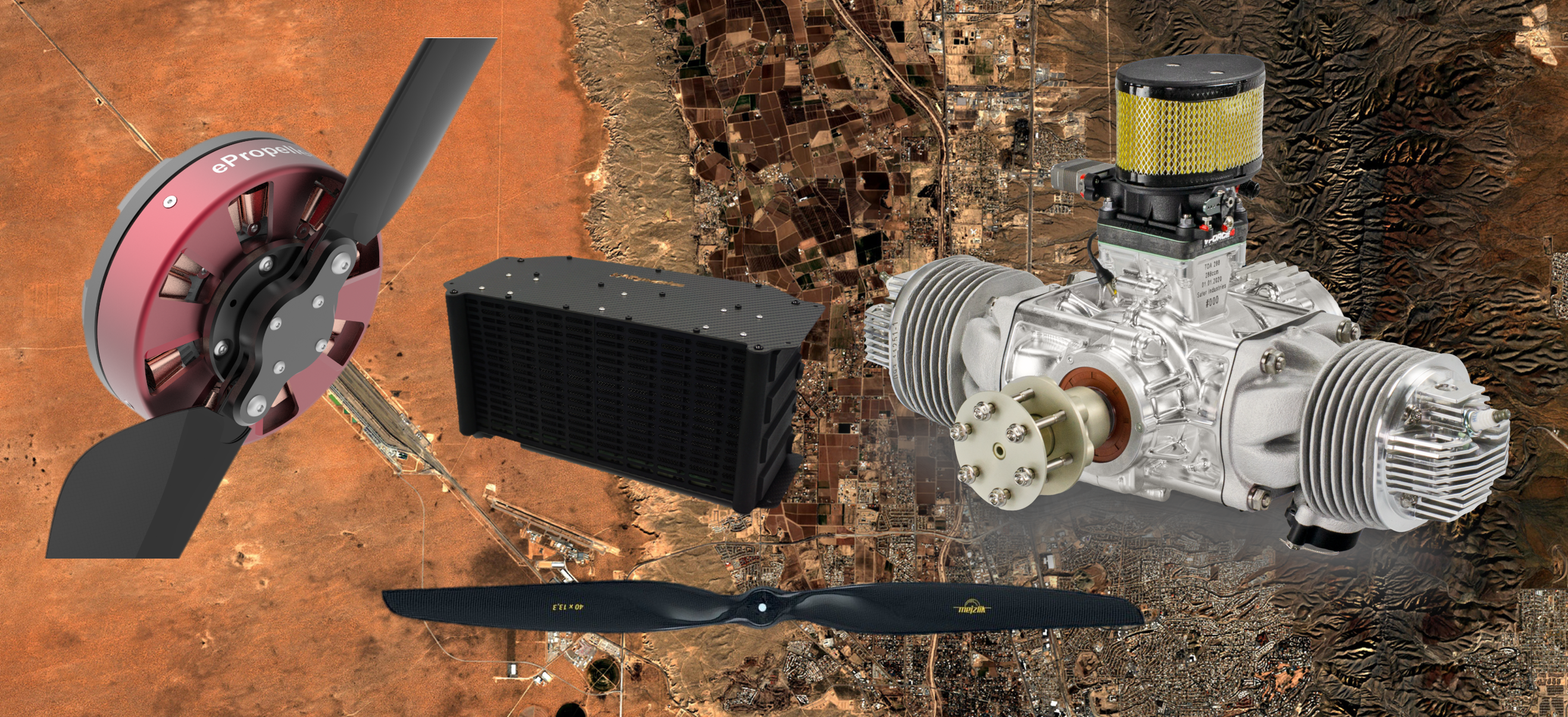
MicroPilot autopilots (board mount, enclosed, triple redundant) including GCS software and SDK, Volz servo actuators for control surfaces & throttle, Aeron Systems MEMS-INS-GPS & Galileo digital compasses.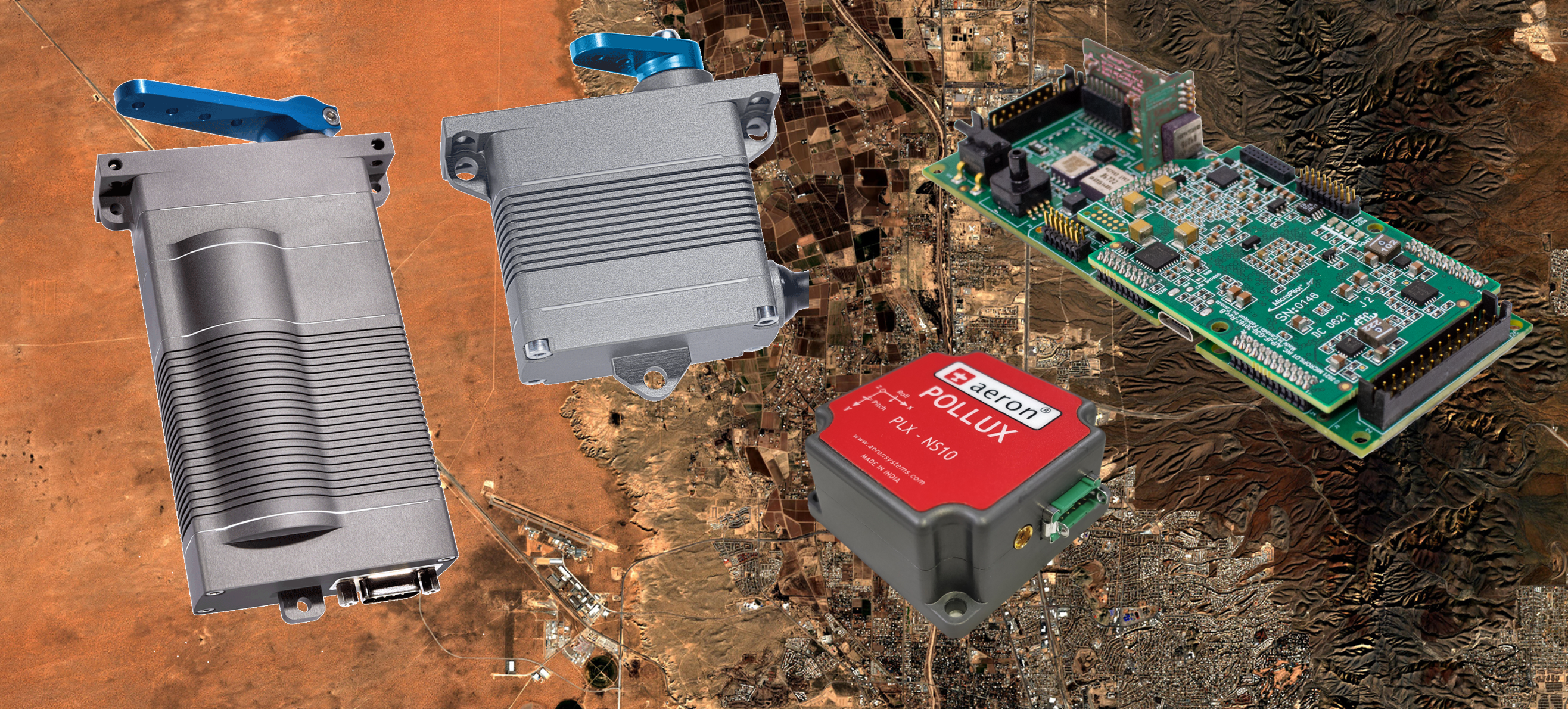
Reventec capacitive fuel level sensors, Sentronics ultrasonic fuel flow sensors, Fuel Safe fuel tanks, Eli Airborne pneumatic launchers & parachute release mechanisms, ProtectUAV/ParaZero parachute rescue systems, Aerobits ADS-B/Remote ID.